



Гидравлический привод механизма подачи станка автомата
Гидропривод – совокупность устройств (в число которых входит один или несколько объемных гидродвигателей), предназначенных для приведения в движение механизмов и машин посредством рабочей жидкости, подводимой под давлением. В качестве рабочей жидкости чаще всего применяют минеральное масло.
KRAB7.COMПрименение гидроприводов в станкостроении позволяет упростить кинематику станков, снизить металлоемкость, повысить точность, надежность и уровень автоматизации.
Наиболее эффективно применение гидропривода в станках с возвратно-поступательным движением рабочего органа, высокоавтоматизированных многоцелевых станках, агрегатных станках и автоматических линиях гибких производственных систем.
Преимущества:
¨ возможность получения больших усилий и мощностей при ограниченных размерах гидродвигателей;
¨ широкий диапазон бесступенчатого регулирования скорости (при условии хорошей плавности движения);
¨ возможность работы в динамических режимах с требуемым качеством переходных процессов;
¨ защита системы от перегрузки;
¨ точный контроль действующих усилий;
¨ компактные гидродвигатели легко встроить в станочные механизмы и соединить трубопроводами с насосной установкой, имеющей один или два насоса;
¨ достаточно высокое КПД;
¨ повышенная жесткость и долговечность.
Недостатки:
¨ потери на трение и утечки, снижающие КПД гидропривода и вызывающие разогрев рабочей жидкости;
¨ наружные утечки приводят к повышенному расходу масла, загрязнению системы и рабочего места;
¨ узлы гидропривода весьма трудоемки в изготовлении;
¨ в связи с наличием внутренних утечек затруднена точная координация движения гидродвигателей.
При правильном конструировании, изготовлении и эксплуатации гидроприводов их недостатки могут быть сведены к минимуму.
В данной работе необходимо произвести проектировку и расчет гидропривода машины с автоматическим циклом движения исполнительного органа.
Исходные данные для расчета включают в себя временную циклограмму возвратно-поступательного движения исполнительного органа (рис.1) и числовые данные для расчета (табл.1).
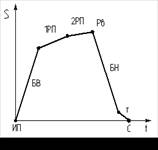
Рис. 1. Циклограмма возвратно-поступательного движения рабочего органа в координатах «путь S – время t»
Обозначения
ИП – исходное положение рабочего органа;
БВ и БН – быстрое движение холостого хода
РП – рабочая подача исполнительного органа;
РВ – реверс рабочего органа;
Т – торможение;
С – остановка рабочего органа.
Таблица 1
|
№ п/п |
Исходные данные |
Числовое значение |
|
1 |
Диапазон скоростей рабочего хода Vp мм/с |
1,0 … 15 |
|
2 |
Скорость холостого хода, Vхх, м/с |
0,08 |
|
3 |
Приведенная средняя нагрузка рабочего хода, R, кН |
40 |
|
4 |
Общая длина перемещения рабочего органа, L, мм |
800 |
|
5 |
Тип гидродвигателя |
ГЦ |
|
6 |
Вид дроссельного регулирования |
На выходе |
- Разработка принципиальной схемы гидропривода
- Расчет основных рабочих параметров
- Подбор гидравлической аппаратуры
- Вывод