



Развитие автоматизации в направлении технологической гибкости и широкого применения ЭВМ
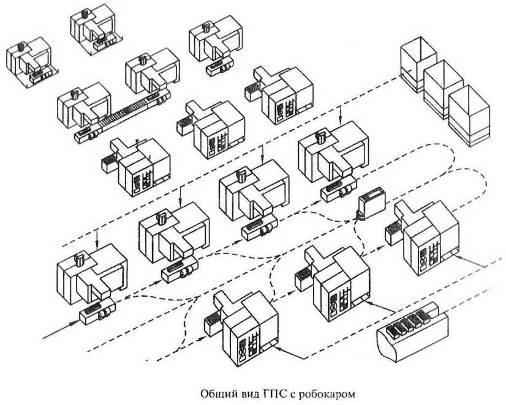
Источником снабжения робокаров материальными потоками является автоматизированный склад со штабелерами, осуществляющими адресуемый доступ к любой ячейке склада. Склад сам по себе является достаточно сложным объектом управления.

В качестве его системы управления используют программируемые контроллеры, ЭВМ или же специализированного устройства.
Наиболее распространенные робокары с индуктивным маршрутослежением имеют следующие характеристики: грузоподъемность — 500 кг; скорость перемещения — 70 м/мин; ускорения при разгоне и торможении соответственно — 0,5 и 0,7 м/с2; ускорение при аварийном торможении 2,5 м\с2; величина подъема палеты — 130 мм; точность остановки робокара — 30 мм; время цикла перегрузки — 3 с; радиус поворота на максимальной скорости — 0,9 м; время работы без подзарядки аккумуляторов — 6 ч; напряжение аккумуляторной батареи — 24В; мощность каждого из двух приводных двигателей — 600 Вт; собственная масса робокара — 425 кг.
Важным преимуществом робокаров как транспортных средств является отсутствие сколько-нибудь серьезных ограничений на расстановку оборудования, которая может быть осуществлена из соображений наибольшей эффективности по любым критериям. Маршрут робокаров нередко оказывается достаточно сложным, с параллельными ветвями и петлями.
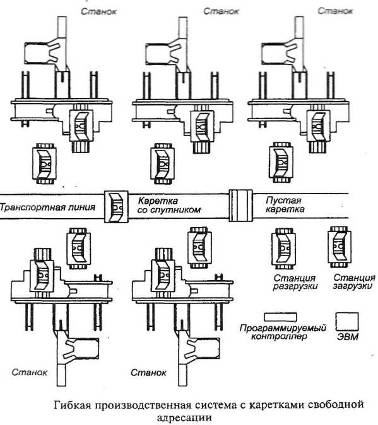
Иногда в ГПС применяются все же не робокары, а транспортные средства со свободной адресацией кареток, несущих спутники. Пример компоновки гибкой системы с подобным видом транспорта. Управление этой транспортной системой осуществляется от программируемого контроллера или от ЭВМ.
Конструктивная модификация ГПС с линейным транспортом, кареткой свободной адресации и неподвижным общим накопителем палет. К транспортной системе подключают не только различное технологическое, но и вспомогательное оборудование, например моечную станцию.
Используется также конструктивная модификация (ГПС) с портальной системой транспортирования палет и с применением автооператора.
Более сложную структуру имеет ГПС в тех случаях, когда наряду с транспортным потоком деталей имеется еще и транспортный поток инструмента. Существует немало способов практической реализации такой структуры. Например, транспортирование деталей может осуществляться с помощью каретки свободной адресации, а доставка инструментальных наладок выполняется рельсовой тележкой, на которой смонтирован робот, играющий роль приемопередающего механизма.
Портальное трехкоординатное устройство для перегрузки инструментов из внешнего инструментального магазина в инструментальные магазины станков. Поток деталей между рабочими ячейками и центральным накопителем палет организован с помощью каретки свободной адресации. Наличие двух потоков усложняет структуру ГПС, но независимость этих потоков позволяет осуществлять оптимальное управление для каждого из них по отдельности.
Известны структурные решения с совмещением транспортных потоков деталей и инструментов. Например, робокар может доставлять к станкам и палеты с деталями, и инструментальные наладки. В таких структурах экономия транспортных средств может привести, однако, к задержкам в обслуживании станков и к усложнению управления.